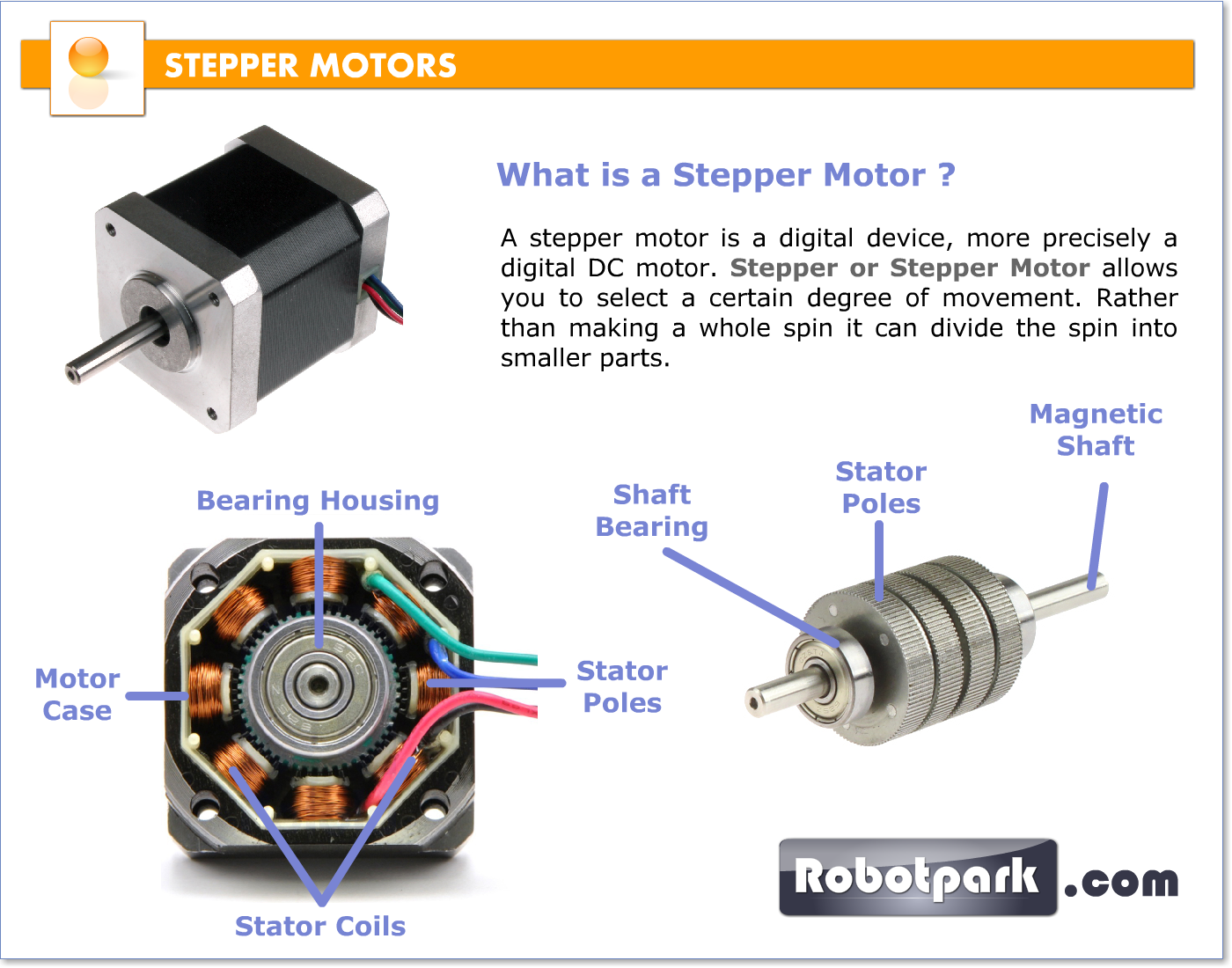
Step motorlar, hassas rotasyonlar gerektiğinde sıkça kullanılan bir motor türüdür. Bir step motorda, PM'leri içeren dahili bir rotor veya belirgin kutupları olan manyetik olarak yumuşak bir rotor, elektronik olarak değiştirilen bir dizi harici mıknatıs tarafından kontrol edilir. Bir adım motoru ayrıca bir DC elektrik motoru ve bir döner solenoid arasında bir çapraz olarak düşünülebilir.
Her bir bobine enerji verildiği zaman, rotor, enerjili alan sargısı tarafından üretilen manyetik alan ile kendini hizalar. Senkron motorun aksine, uygulamasında, adım motoru sürekli olarak dönmeyebilir; bunun yerine, "adımlar" —starts ve daha sonra hızlı bir şekilde durur - alan sargıları enerjilenirken ve dizilimde enerjisiz kaldıkça bir konumdan diğerine. Diziye bağlı olarak, rotor ileri veya geri dönebilir ve yön değiştirebilir, durur,herhangi bir zamanda keyfi hızlandırmak veya yavaşlatmak.
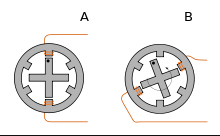
Basit step motor sürücüleri, alan sargılarını tamamen enerjilendirir veya tamamen enerjisiz hale getirir ve rotoru sınırlı sayıda pozisyona "dişli" olarak yönlendirir; Daha sofistike sürücüler, alan sargılarına giden gücü orantılı olarak kontrol ederek, rotorların dişli noktaları arasında konumlanmasını ve böylece son derece sorunsuz bir şekilde dönmesini sağlar. Bu işlem modu, genellikle mikrostep olarak adlandırılır . Bilgisayar kontrollü stepper motorlar, özellikle dijital servo kontrollü bir sistemin parçası olduğunda, en çok yönlü konumlandırma sistemlerinden biridir .
Step motorlar, farklı adımlarla belirli bir açıda kolaylıkla döndürülebilir ve bu nedenle, bilgisayar disketli disket sürücülerinde okuma / yazma kafası konumlandırması için adım motorları kullanılır. Gigabyte öncesi bilgisayar disk sürücülerinde aynı amaç için kullanıldılar, burada sunulan hassaslık ve hız, bir sabit disk sürücüsünün okuma / yazma kafasının doğru konumlandırılması için yeterliydi.
Tahrik yoğunluğu arttıkça, kademeli motorların hassas ve hız sınırlamaları onları sabit diskler için kullanılmaz hale getirdi - hassas sınırlama onları kullanılamaz hale getirdi ve hız sınırlaması onları rakipsiz hale getirdi - böylece daha yeni sabit disk sürücüleri ses bobini tabanlı kafa aktüatör sistemlerini kullanıyorlar.
Bu bağlamda "ses bobini" terimi tarihidir, tipik bir (koni tipi) hoparlörde yapıya atıfta bulunur.Bu yapı kafalarını konumlandırmak için bir süre kullanılmıştır.Modern sürücüler, bir döner bobin yuvasına sahiptir; Bobin ileri geri döner, döner fanın bıçağı gibi bir şey. Yine de, bir ses bobini gibi, modern aktüatör bobin iletkenleri (manyetik kablo) manyetik kuvvet çizgilerine dik olarak hareket eder.
Optik tarama elemanını, baskı kafası taşıyıcısını (nokta vuruşlu ve mürekkep püskürtmeli yazıcıların) ve baskı silindirlerini veya baskı silindirlerini hareket ettirmek için bilgisayar yazıcıları, optik tarayıcılar ve dijital fotokopi makinelerinde step motorlar sıklıkla kullanılmıştır ve hala kullanılmaktadır. Benzer şekilde, birçok bilgisayar ploteri (1990'ların başından bu yana büyük formatlı inkjet ve lazer yazıcılarla değiştirilmiştir) kalem ve plaka hareketi için döner step motorları kullandı; Buradaki tipik alternatifler, ya doğrusal çevrim motorları ya da kapalı çevrim analog kontrol sistemlerine sahip servo motorlardı.
Sözde kuvars analog kol saatleri en küçük basamaklı motorları içerir; bir bobinleri var, çok az güç çekiyorlar ve bir PM rotoru var. Aynı türden motorlar, akülü kuvars saatler kullanır. Kronograflar gibi bu saatlerden bazıları, birden fazla basamaklı motor içerir.
Üç fazlı AC senkron motorlara tasarımla yakından ilişkili olan step motorlar ve SRM'ler değişken relüktans motor tipi olarak sınıflandırılır. Step motorlar, bilgisayar yazıcılarında, optik tarayıcılarda ve yönlendiriciler, plazma kesiciler ve CNC torna tezgahları gibi bilgisayar sayısal kontrol (CNC) makinelerinde sıklıkla kullanılmaktadır ve halen kullanılmaktadır .
Yorumlar
Yorum Gönder